Pose-Estimation 论文
CVPR-2020 UniPose: Unified Human Pose Estimation in Single Images and Videos
WASP
WASP的结构如下图所示(实际上该作者还写过一篇论文Waterfall Atrous Spatial Pooling Architecture for Efficient Semantic Segmentation,单独写了这个WASP结构,用在语义分割上,这又写了一篇用在姿态识别,水论文么)
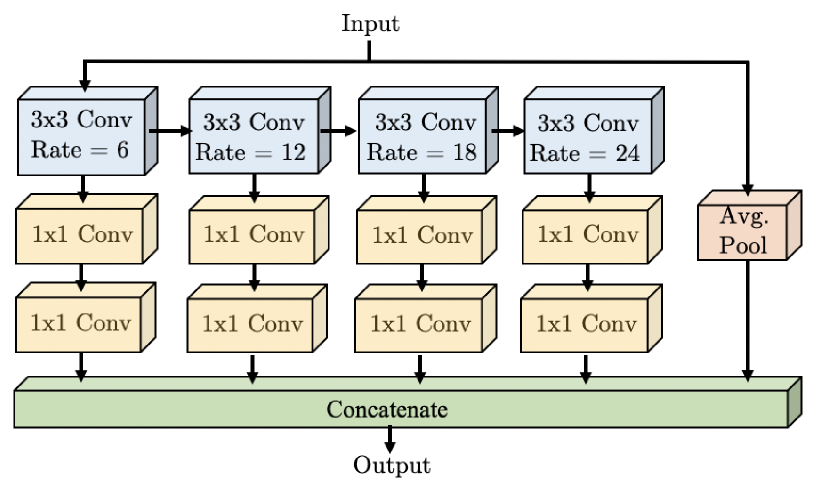
作者说是借鉴ASPP、Cascade和Res2Net。
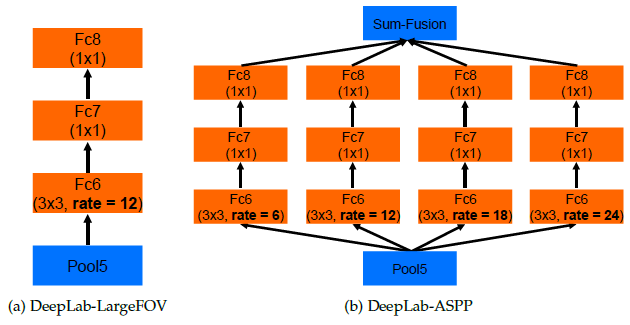
简单来说,ASPP就是,对于同一个input,用不同dilation的卷积去运算,这样做的好处是在不改变计算量的前提下增大感受野,能够更好的捕捉不同尺度目标的信息。很显然,WASP里面那一行蓝色的就是借用了ASPP里的这一设计思路。
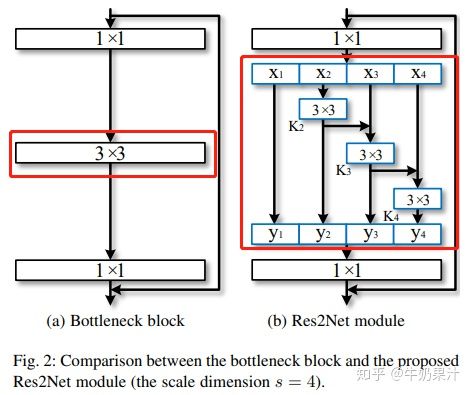
Res2Net,多尺度特征融合的一个新方法,而且是从一个更细的粒度上去进行多尺度特征融合。常见的方法例如FPN都是从层这个粒度上去融合多尺度特征的,但是Res2Net是从卷积运算的层面上去进行多尺度特征偶然那个和。需要注意的是,这里是把特征按通道来分成\(s\)等份(下图中\(s=4\)),然后每一组按照下述方法进行运算,例如\(X_2\)仅过\(3\times3\)卷积之后得到\(K_2\),\(K_2\)和\(X_3\)加起来继续\(3\times3\)卷积,以此类推。可以看到对于不同组的特征,他们仅过卷积的次数是不一样的,那么感受野也就不一样,所以是不同尺度的特征融合。
个人理解Cascade和Res2Net指的都是WASP中每个卷积之间的横向箭头。
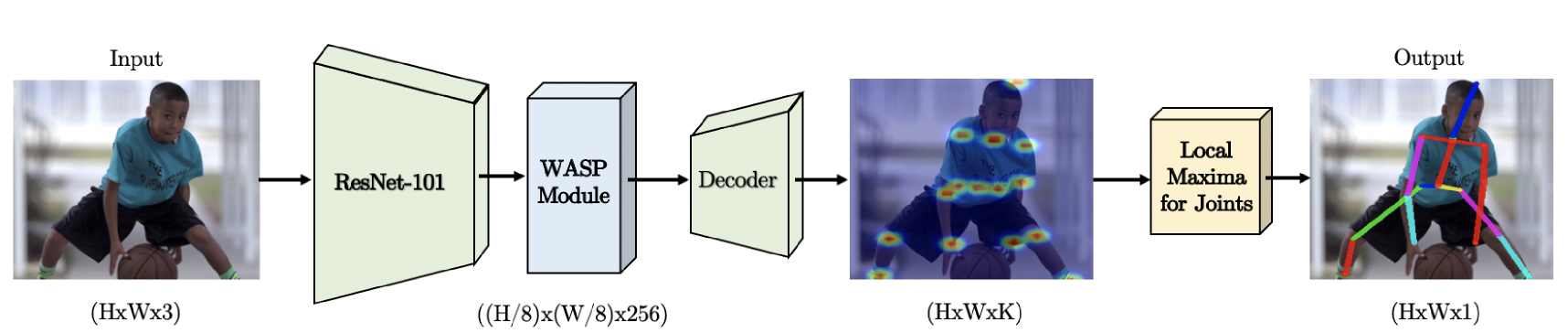
UniPose的整体架构如上图所示。输入一张图片,经过ResNet-101提取特征,然后再进过一个WASP模块提取不同尺度的特征,再进过Decoder将特征转化为热图。
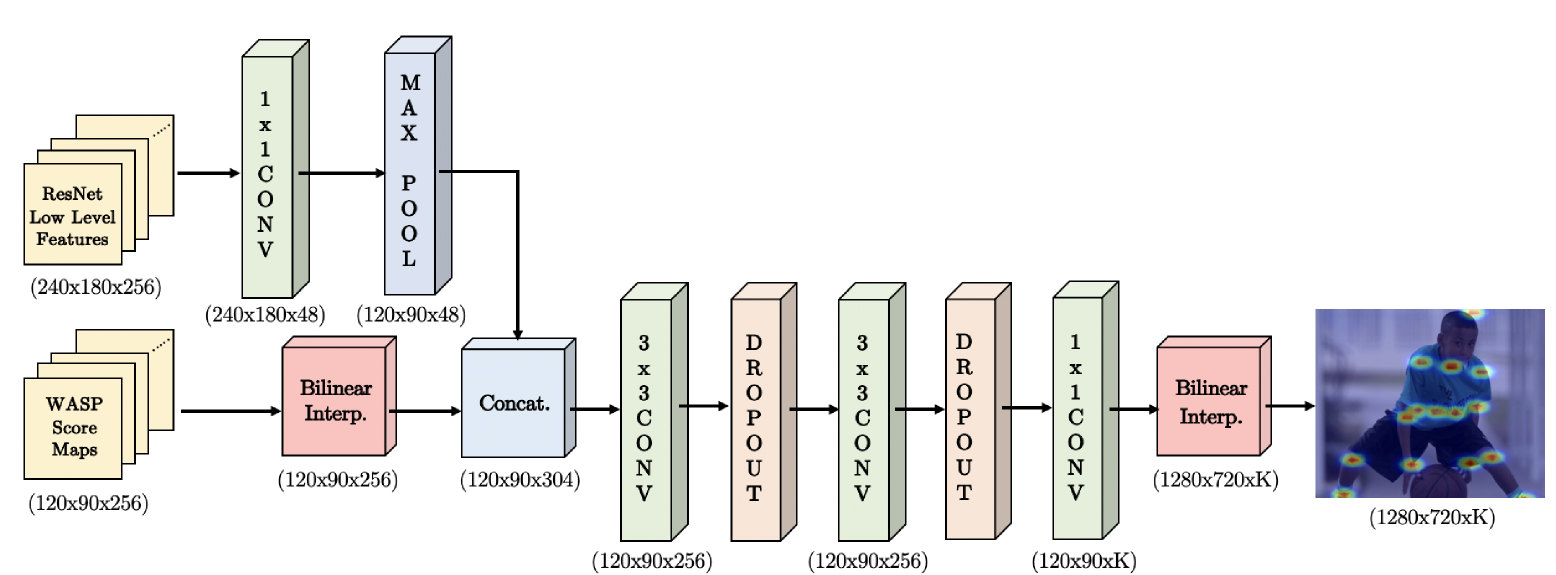
其中的Decoder模块,结构也很简单,就是多个卷积层和Dropout的堆叠,最后用双线性插值上采样到输入大小。这里需要注意Decoder的输入,不仅仅是WASP的输出,还有来自ResNet-101的底层特征,特征融合的过程也比较常规。
UniPose-LSTM
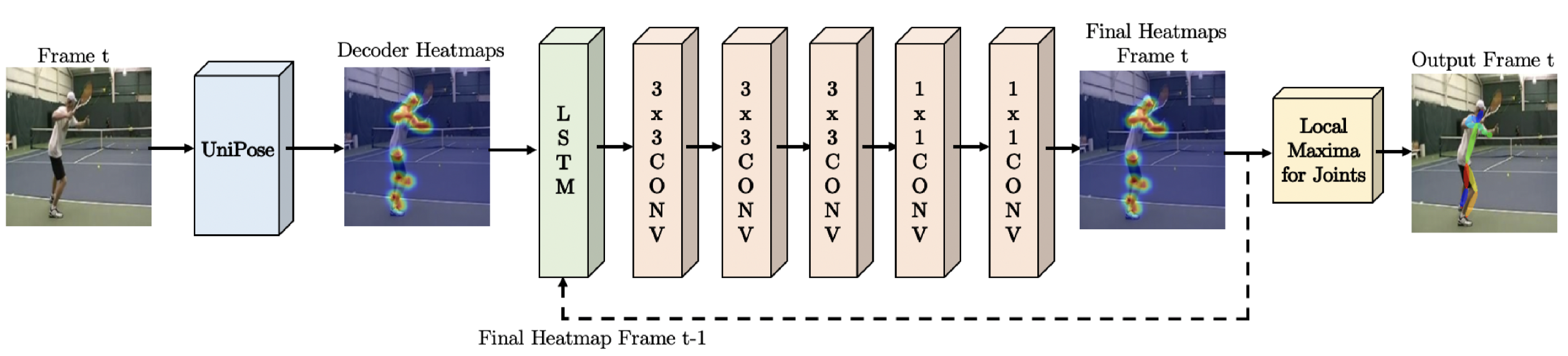
为了利用视频中的时序信息,作者有提出了UniPose-LSTM。其实也没什么特别的,就是用LSTM连起来。前一帧的heatmap和当前帧的heatmap作为LSTM的输入,经过几次卷积后得到最终的heatmap。但是作者这里没有明确前一帧和当前帧的heatmap是怎么结合在一起的,考虑到作者说参考的是LSTM Pose Machine,而LSTM Pose Machine里就是直接将两帧的特征concat,大胆猜测这里也是将前一帧和当前帧的heatmap做concat。
CVPR-2018 LSTM Pose Machines
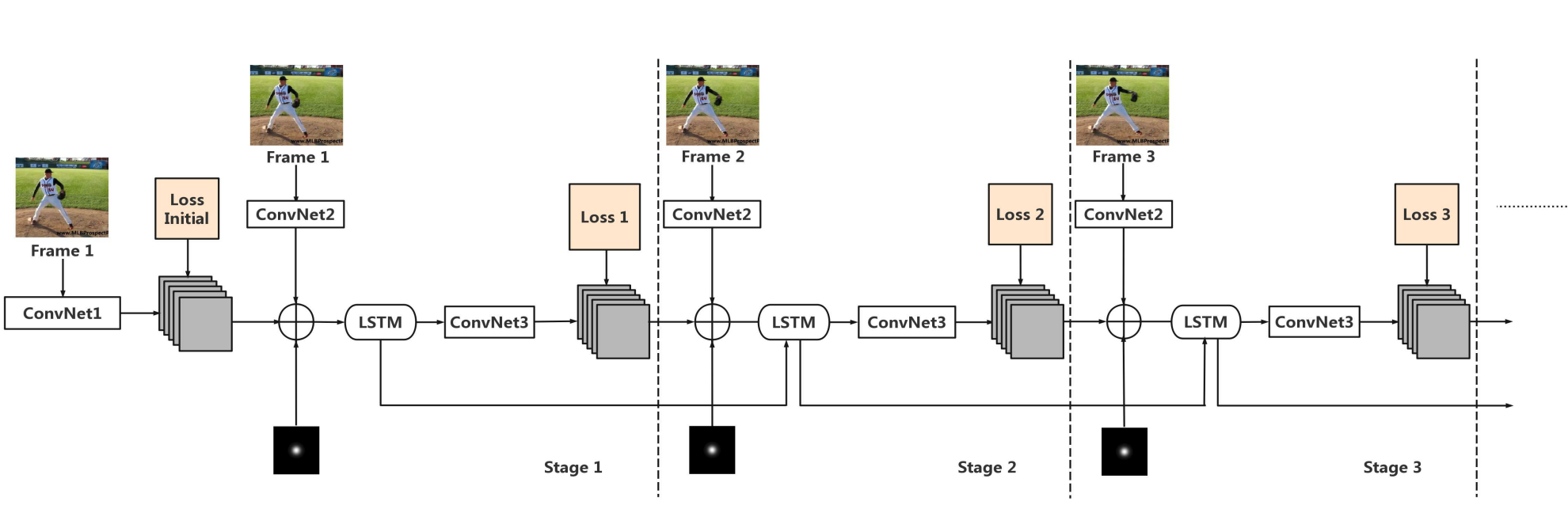
使用LSTM提取视频中的时序信息,改善视频中关节点预测的连续性,算是用到RNN较早的一篇论文了。模型结构如下图所示,对于第一帧图像,用较浅的ConvNet1得到一个热力图当作上一帧的输出,然后和当前帧通过ConvNet2得到的热力图加起来,再加上一个额外的Central Gaussian Map(CPM里用这个来提高准确率),合在一起作为LSTM的输入,然后LSTM的输出经过ConvNet3解码得到热力图。
ConvNet1、ConvNet2、ConvNet3和CPM中各个模型相同,LSTM用的是Conv-LSTM。主要的不同点在于把矩阵乘法换成了卷积。下面的公式里,\(*\)本来是矩阵乘法,在Conv-LSTM中是卷积(一般是\(3\times3\)卷积),目的是关注局部信息,全局信息可以用LSTM提取。 \[ \begin{align*} g_t &= \tanh{(W_{xg}*X_t + W_{hg}*h_{t-1} + b_g)} \\ i_t &= \sigma{(W_{xi}*X_t + W_{hi}*h_{t-1} + b_i)} \\ f_t &= \sigma{(W_{xf}*X_t + W_{hf}*h_{t-1} + b_f)} \\ o_t &= \sigma{(W_{xo}*X_t + W_{ho}*h_{t-1} + b_o)} \\ C_t &= f_t \odot C_{t-1} + i_t \odot g_t \\ h_t &= o_t \odot \tanh{(C_t)} \end{align*} \]