Weakly-supervised Action Localization
Action Localization 任务是对Action Recognition任务的提高版,不仅仅需要识别出视频中的是什么动作,还需要知道这个动作起始帧和终止帧的具体位置。如果是Action Recognition是图片分类的话,那么Action Localization就是目标检测,不仅仅要知道bounding box里面的是什么,还要知道这个bounding box应该画在哪里。
这里的弱监督指的是只标注了视频中包含什么行为(一个视频中可能包含多个行为),但是没有标注这个行为的起始帧和终止帧。也就是说,模型需要根据video-level的标注,回归得到每个行为具体发生的起止时间,相对来说这个任务更加困难。
AAAI-2020 Background Suppression Network for Weakly-supervised Temporal Action Localization
Weakly-supervised
有学者将Weakly-supervised Action Localization问题化归为Multiple Instance Learning。MIL,简单来说,就是一个集合中有多个实例,如果每个实例都是负样本,那么这个集合就是负样本;如果这个集合中至少有一个正样本,那么这个集合就是正样本,我们的任务是去预测每个集合的类别。因为视频是由一帧帧图像组成的,那么action localization就可以理解为是我找到一个视频片段,如果这个片段中至少有一帧包含我所关注的行为,那么我就认为这个片段是一个正样本(就所关注的行为而言),否则就是负样本,至于这个片段是否tight,那这个就需要其他方法来进一步优化了。
但本文的作者认为,视频中有大量帧是不包含任何感兴趣的动作的,如果不单独加入一个background的类,那这些没有任何感兴趣的动作的帧会被迫分类为某一个动作,这是不合适的,所以作者第一步就是加入了background这个类别。
这时候目标检测里所存在的类别不均衡的问题就出来,如果加入background,那么必然大多数帧都应该是background,这时候background和包含感兴趣的动作的帧的数量就会有很大的差异,导致类别不均衡。(目标检测中的Focal Loss说不定可以一试?)
针对这个问题,作者提出了使用Filter Module来找出background并过滤的方法来解决。
Method
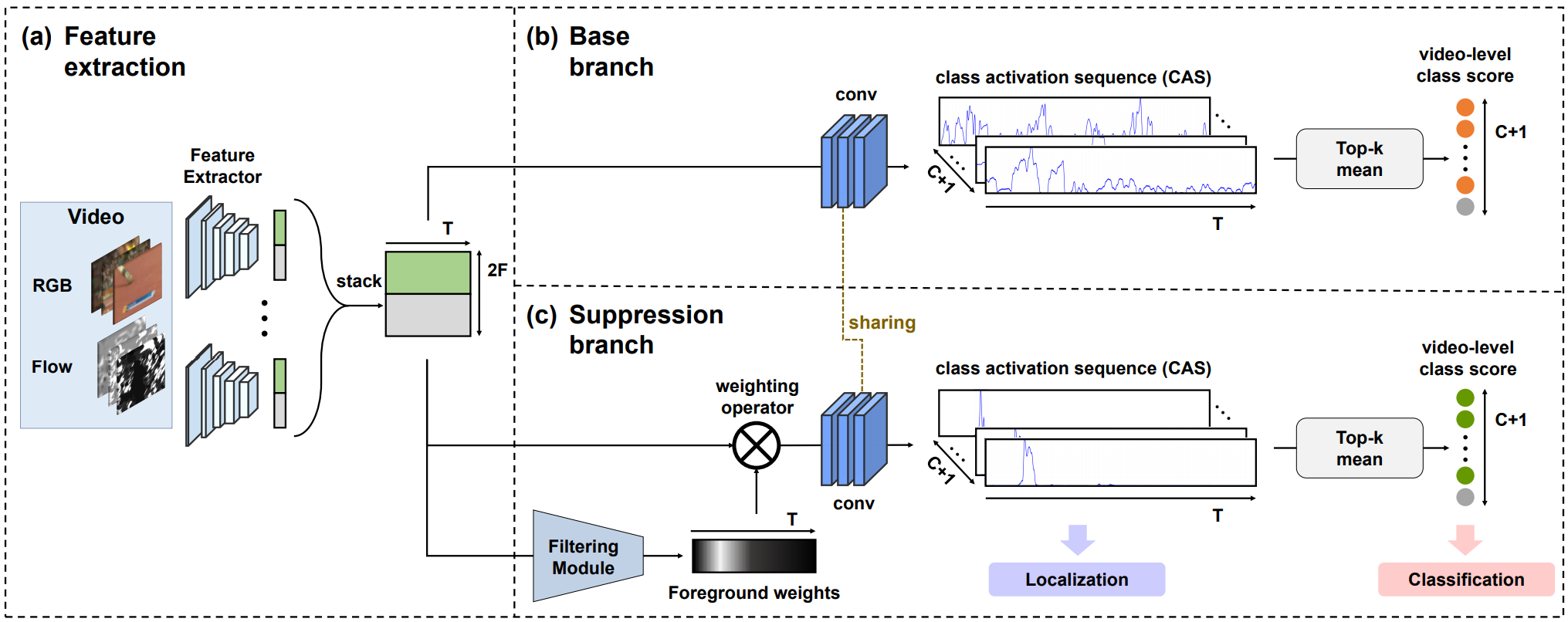
上图就是作者提出的BaSNet(Background Suppression Network),左边的特征提取用的是I3D双流网络,特征提取部分不参与网络的训练。给定一个长度为\(T\)帧的视频片段,分别提取RGB和光流特征\(R^{F\times T}\),拼接起来之后得到整个片段的特征\(R^{2F\times T}\)。
网络采用双分支的结构,第一个base branch和其他网络类似,通过一个\(1\times 1\)卷积得到Class Activation Sequence(CAS)。若数据集中一共有\(C\)个动作类别,那么得到的CAS就是\(R^{(C+1)\times T}\),通道\(i\)都表示片段中每一帧包含动作\(i\)的得分,然后计算每个通道top-k的均值得到\(R^{(C+1)}\),设就是video-level class score了;对于第二个Suppression branch,就是多了一个加权的过程,对片段的特征做两个\(1\times 1\)卷积,得到每帧不是background的概率,将这个概率和片段特征相乘之后再获得CAS,方法和base branch相同,并且卷积的参数是共享(这也可以??)。
这里有一个小细节,在base branch,所有帧的background这个类都设置为1,而在suppression branch这都设置为0,作者说这是为了让suppression branch正确区分是否是background。
模型的损失是Binary Cross Entropy,就是每次判断是否是类别\(i\),而不是去判断他是C类中的哪一个,这样可以降低其他类别的影响,适合于Multi-label的任务(Multi-class是指数据集中的样本可被分为2以上的类别,Multi-label是指数据集中每个样本可以属于多个不同的类别)。
最后设定阈值,超过阈值的认为是包含感兴趣的动作,然后把这些连起来就是一个候选动作区间。至于得到这些区间之后怎么继续下去,作者说和下面这篇论文一致。
CVPR-2019 Completeness Modeling and Context Separation for Weakly Supervised Temporal Action Localization
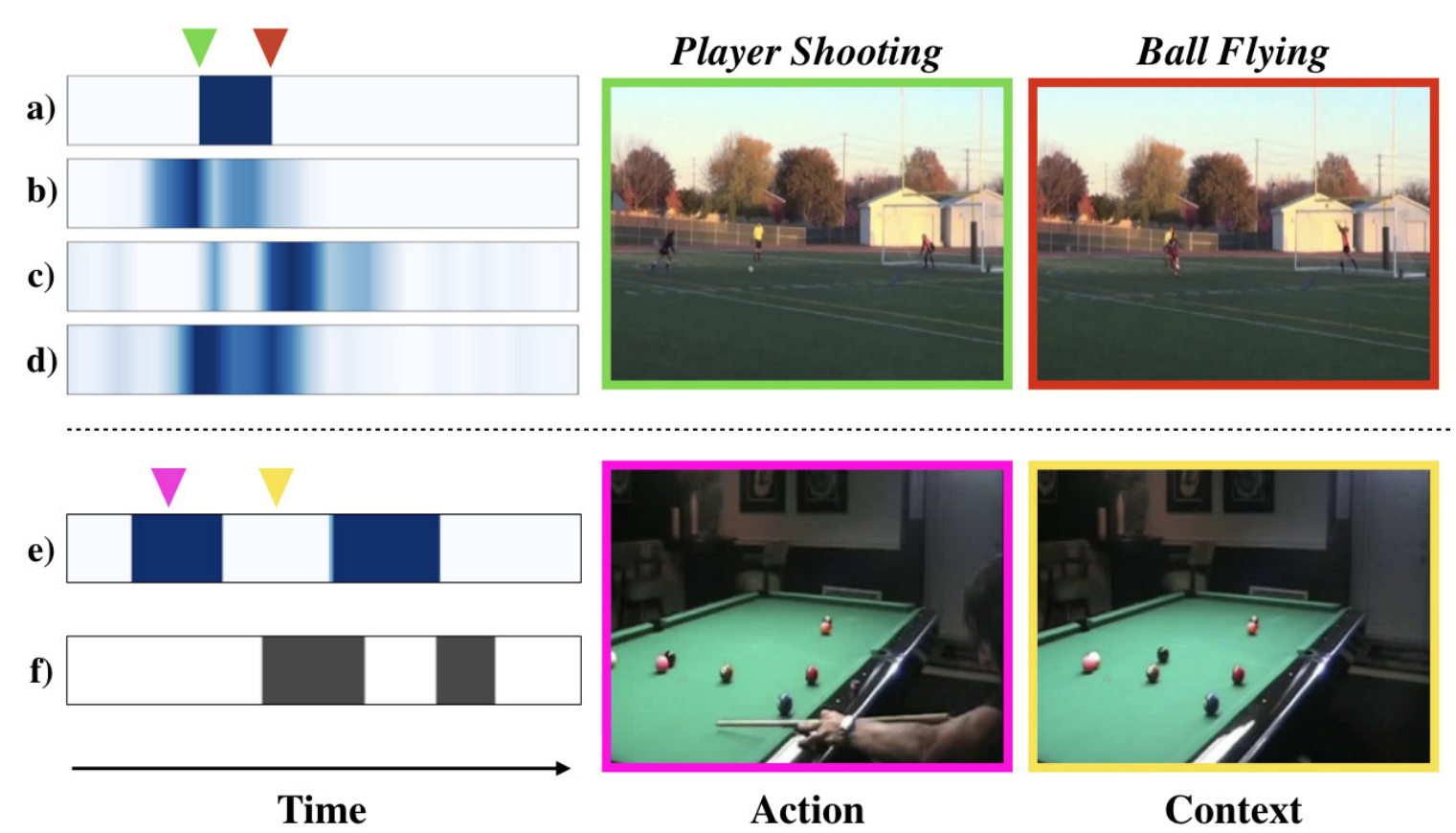
主要针对两个问题,一是动作的完整性,比如上图上方射门的例子,包含运动员射门和球飞行两个自动做,作者通过设计多个不同的分支网络,让他们分别关注动作的不同部分,最后求均值来获取更好的CAS。二是动作的上下文和一般的background是不一样的,例如上图下方,台球桌对识别打台球的动作是有帮助的,而且通常出现在动作发生的前后,其分布是有一定规律的,但是background的分布是随机的,同时这些动作上下文也会干扰动作区间的检测,作者通过构造难例来解决。
Method
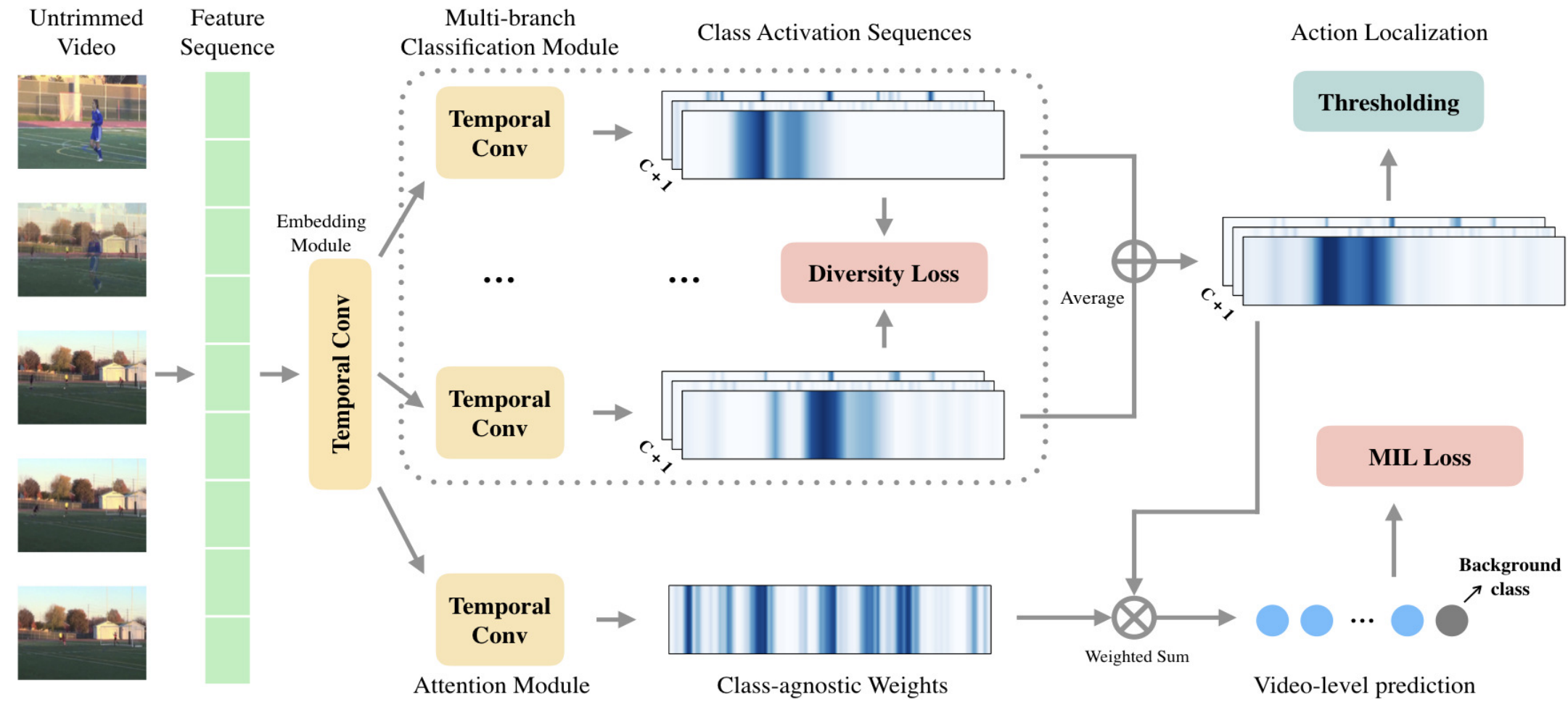
上图是作者提出的模型结构,首先是提取视频特征\(R^{T\times D}\),这里的\(T\)作者说是片段数(the number of snippets)。因为预训练的特征提取网络所提取的特征可能不完全适应action localization,所以添加一个Embedding层,得到特征\(R^{T\times F}\)。这个特征分别被被送到\(K\)分类分支中去,其实就是一个\(1\times 1\)卷积,然后再做Softmax得到CAS。为了防止这\(K\)各分支学习到相同(或极其相似)的信息,作者加入了一个diversity loss,其中\(\overline{A^i_{\star,c}}\)表示Softmax之后第\(i\)个branch的第\(c\)个类别的CAS \[
\mathcal{L}_{div}=\frac{1}{K(K-1)(C+1)/2}\sum_{c=1}^{C+1}{\sum_{i=1}^{K-1}{\sum_{j=i+1}^{K}}{\frac{\overline{A^i_{\star,c}}\cdot\overline{A^j_{\star,c}}}{\Vert\overline{A^i_{\star,c}}\Vert\ \Vert\overline{A^j_{\star,c}}\Vert}}}
\] 实际上就是让各个分支之间CAS的相似度尽可能小,也就是说不同的branch要在不同的时刻得到较高的激活值,这就能解决动作完整性的,问题,相当于每个branch关注动作的不同部分,虽然单个来看是不够完整的,但是拼在一起就是一个好的结果。
作者通过实验观察到,往往会存在有一个branch值比较大,而其他branch的值接近于0,这样就会出现一个branch处于主导地位,这不是作者想要的;另一方面这\(K\)个branch就像是相互竞争,类似于GAN,所以要尽可能平很各个branch。为此,作者引入了一个另一个损失,降低每个branch中每个类的标准差(没明白为什么要最小化标准差),其中\(A^{avg}=\sum_{k=1}^K {A^k}\) \[ \mathcal{L}_{norm}=\frac{1}{K(C+1)}\sum_{c=1}^{C+1}{\sum_{i=1}^{K}}{|\Vert{A^i_{\star,c}}\Vert - \Vert{A^{avg}_{\star,c}}\Vert|} \] 最后作者又加了一个简单的Attention来学习片段的重要性,再利用它加权得到视频中含有各个动作的概率: \[ \overline{p}=softmax{\sum_{t=1}^T{att_tA^{avg}_{t,\star}}} \] 上述这些模块就解决了动作完整性的问题,整体的损失函数为: \[ \mathcal{L}=\alpha\mathcal{L}_{div}+\beta\mathcal{L}_{norm}+\mathcal{L}_{mil} \]
Localization
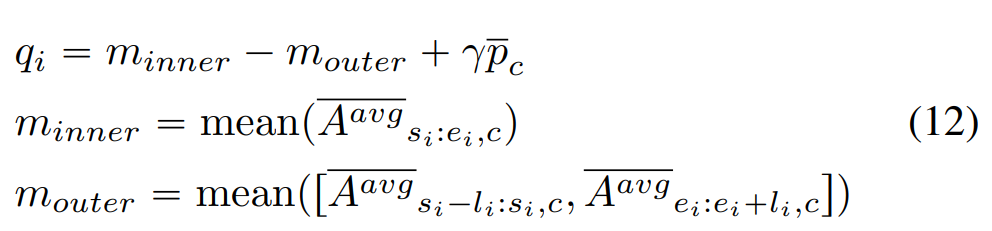
有点复杂。输入一个测试视频,得到它包含每个动作的概率,不考虑background,去掉所有包含这个动作的概率小于于0.1的CAS;在剩余的CAS中,利用\(\overline{A^{avg}_{\star,c}}\)作为阈值选出大于阈值的片段,然后这些片段就作为一个proposal。接下来使用一些公式来个每个片段打个分,实际上就是他同时考虑这个片段的CAS均值和这个片段附近的CAS均值(可这个分有什么用呢?答:作为区间的置信度,用于NMS)
CVPR-2018 Weakly Supervised Action Localization by Sparse Temporal Pooling Network
作者认为行为可以通过识别视频中的一些关键片段来识别,所以作者提出了一个能够自动学习片段重要性的网络,并自动选择一个具有代表性的自己来识别视频中的行为。
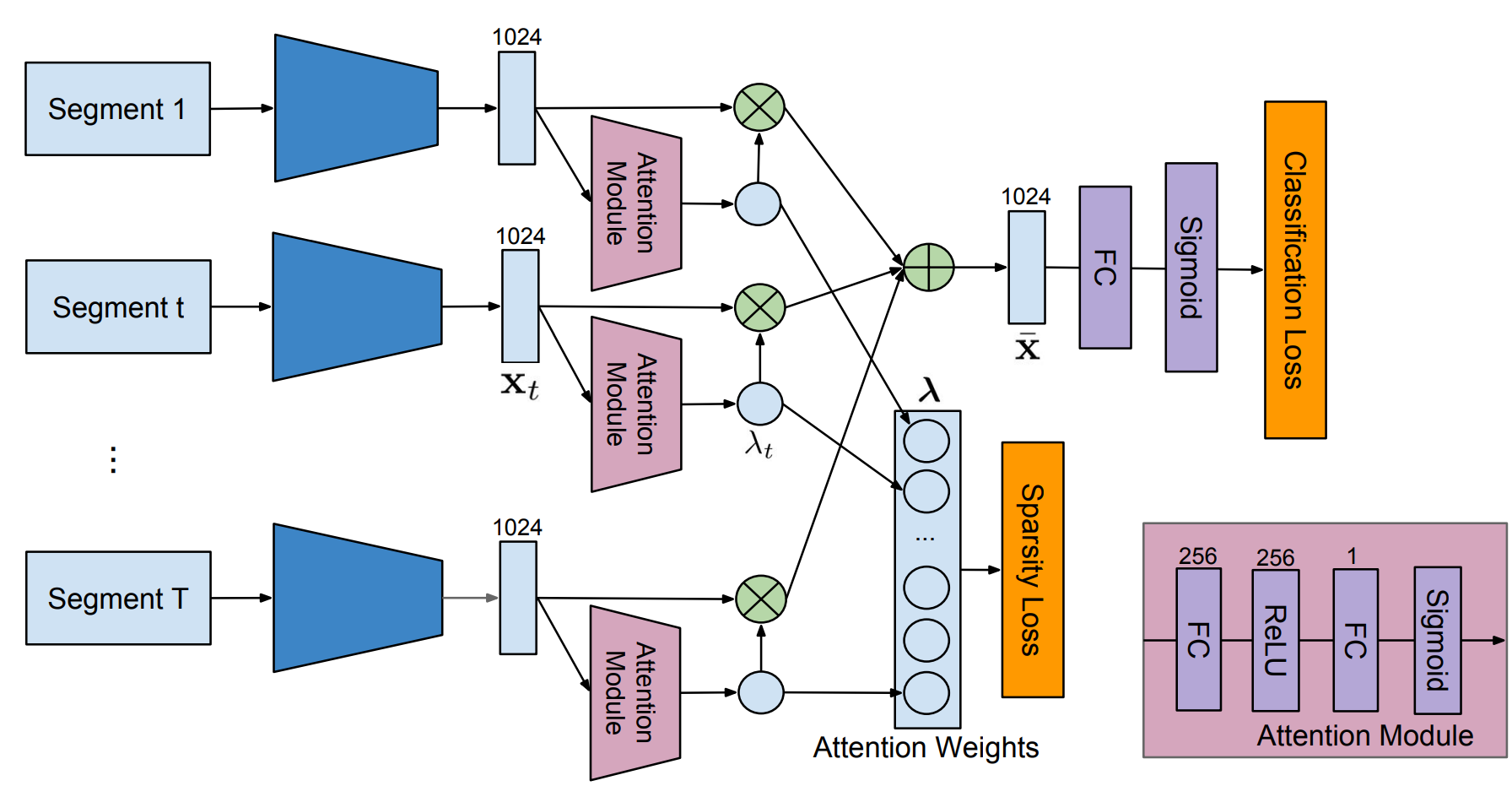
每个视频被分为\(T\)个片段,每个以第\(t\)帧为中心的视频片段都被表示成特征\(x_t\in R^m\),每个特征通过一个Attention Module得到一个该片段的权重值\(\lambda_t\),根据这些权重值加权求和后得到视频级的特征\(\overline{x}=\sum_{t=1}^T{\lambda_t x_t}\),这一视频级的特征被用来估计视频中包含每种动作的概率,并用多标签交叉熵损失函数来优化。而对学习得到的权重\(\lambda=[\lambda_1, \lambda_2,\cdots, \lambda_T]\),为了能够让让模型自动选择具有代表性的子集,所以使用了L1正则化来增加\(\lambda\)的稀疏性。上述两个损失函数组合之后得到最终的损失函数: \[ \mathcal{L}=\mathcal{L}_{class}+\beta\cdot\mathcal{L}_{sparsity} \] 同时,作者提出了Temporal Class Activation Map(T-CAM),其实就是一个公式变换。注意每个片段的特征\(x_t\in R^m\),公式里的\(m\)是特征维数。 \[ \begin{align*} s^c&=\sum_{k=1}^m{w^c_k\overline{x}_k} \\ &=\sum_{k=1}^m{w^c_k\sum_{t=1}^T{\lambda_t x_{t,k}}} \\ &=\sum_{t=1}^T{\lambda_t\sum_{k=1}^m{w^c_k x_{t,k}}} \end{align*} \]
作者说他的T-CAM可以表示为\(a_t=(a_t^1,a_t^2,\cdots,a_t^T)^T\),其中\(a_t^c=\sum_{k=1}^m{w^c_k x_{t,k}}\)(这一步实现还是挺有意思的,作者在测试的时候直接获取了全连接层的权重矩阵)
Localization
以RGB为例,那么首先根据每个片段的权重值得到加权后的T-CAM \[ \psi_t^c=\lambda_t\cdot sigmoid(a_t^c) \] 记者就是普通的阈值法获得temporal proposal,每个proposal可以表示为\([t_{start}, t_{end}, score]\),score的计算公式如下: \[ \sum_{t=t_{start}}^{t_{end}}{\lambda_{t,\star}\frac{\alpha \cdot a_{t,RGB}^{c}+(1-\alpha)\cdot a_{t,FLOW}^{c}}{t_{end} - t_{start} + 1}} \] 实际上就是对这个proposal中的T-CAM加权求和,再做一些归一化(去除proposal长度不同带来的影响)。这个score用在NMS,以前的方法是直接选最长的一个proposal,显然不够合理。
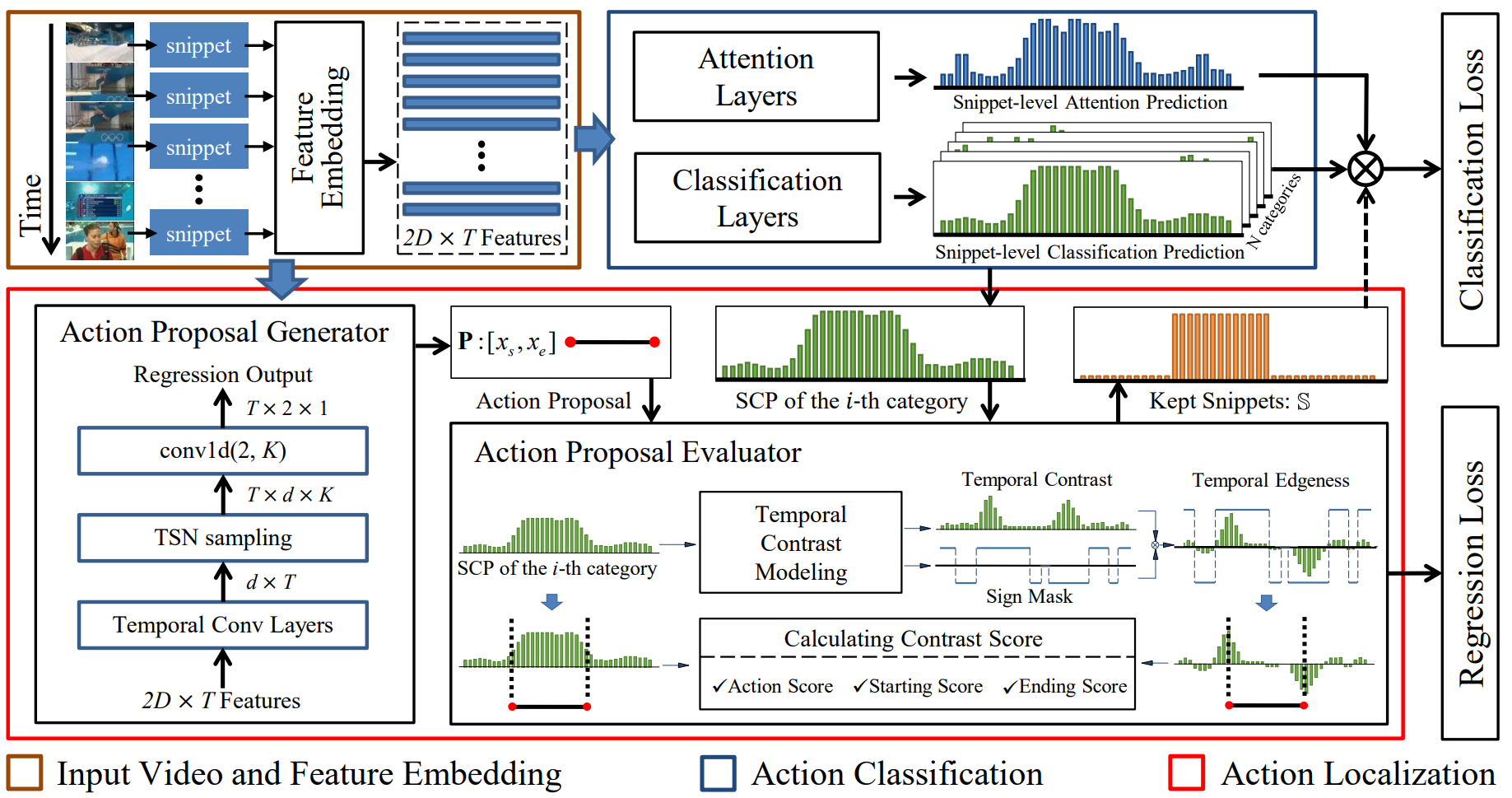
ICCV-2019 Weakly Supervised Temporal Action Localization through Contrast based Evaluation Networks
CVPR-2017 UntrimmedNets for Weakly Supervised Action Recognition and Detection
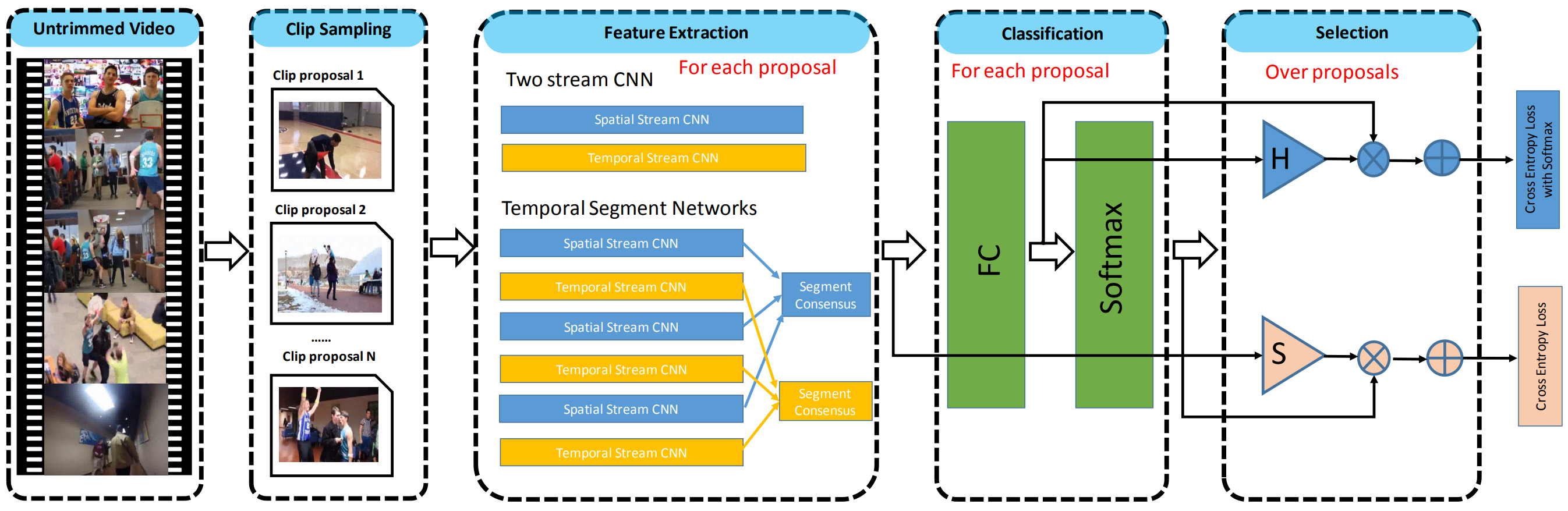
首先是片段采样,作者提出了两种采样方法。第一种是均匀采样,把一个视频分成等长的\(N\)段,但是这种采样方式没有考虑到动作的连续性和一致性,因此生成的proposal可能是不够准确的;第二种采样方法是基于shot(镜头?)的采样,作者使用每帧的HOG特征的差值来划分shot。计算每帧图像的HOG特征,如果相邻帧之间HOG特征的差值超过了阈值,那么就是上一个shot的结束,下一个shot的开始。然后对每一个shot,每个连续\(K\)帧都是一个proposal。
对每个proposal,使用TSN和双流CNN分别提取特征,比较常规,输入的构造方法和原模型一致。
分类模块很简单,就是一个全连接层再加一个softmax,得到每个proposal包含某个动作的概率,其中\(C\)表示动作类别的个数,\(\phi(p)\)表示第\(p\)个proposal的特征: \[ \begin{align*} \mbox{x}^c(p)&=W^c\phi(p)\\ \mbox{x}^c(p)&=[x^c_1(p),x^c_2(p),\cdots]\\ \overline{x}^c_i(p)&=\frac{\exp(x^c_i(p))}{\sum_{k=1}^C\exp(x^c_k(p))} \end{align*} \] 接下来就是选择模块,选择出最有可能包含动作的proposal,作业也提出了两种方法。首先是hard selection,对每个动作类别,分别选出得分(这里用的是softmax之前的值)最高的\(k\)个proposal;第二个是soft selection,其实就是标准的attention,是一个跨clip的融合吧。 \[ \begin{align*} x^s(p)&={w^c}^T\phi(p)\\ \overline{x}^s(p)&=\frac{\exp(x^s(p))}{\sum_{k=1}^C\exp(x^s(k))} \end{align*} \] 接着就是融合了,soft selection就根据\(\overline{x}^s(p)\)来融合,hard selection因为没有做softmax,就再做一次softmax \[ \begin{align*} x_i^p(V)&=\sum_{n=1}^{N}{x^s_i(n)x_i^c(n)} \\ \overline{x}_i^p(V)&=\frac{\exp(x_i^r(V))}{\sum_{k=1}^C\exp(x_k^r(V))} \\ x_i^p(V)&=\sum_{n=1}^{N}{\overline{x}^s(n)x_i^c(n)} \end{align*} \]
文中上下标混乱不堪,看懂意思就行了吧。